Dabbing is a loose term for pick and place robotic movements being used relative to a work area. This specific file takes user defined points, duplicates them +30mm in the Z axis for entry and exit points, and then outputs robotic code to run on the Kuka KR60 #1. This file can be used for a large variety of tasks, such as dot painting, pointalism style drawing and painting, as well as extrusion printing in dot patterns.
Template Files: 2019.09.10 Dabbing.3dm
Algorithm Steps:
- Input (point input only)

Right click the Pt container and select add point or multiple points to define your points for movement.
- Dabbing Motion Control

This part of the file duplicates your points for entry and exit points. Move the number slider from 30mm to any other value - this will change the height of your entry and exit points above the work plane.
- Robotic Setup
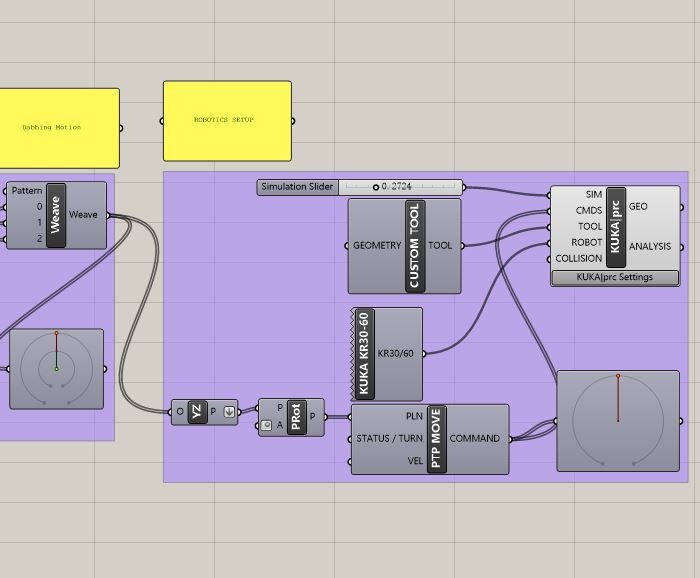
This is where the points are merged with the robot and tool containers to produce the robot code.
Save .src File:
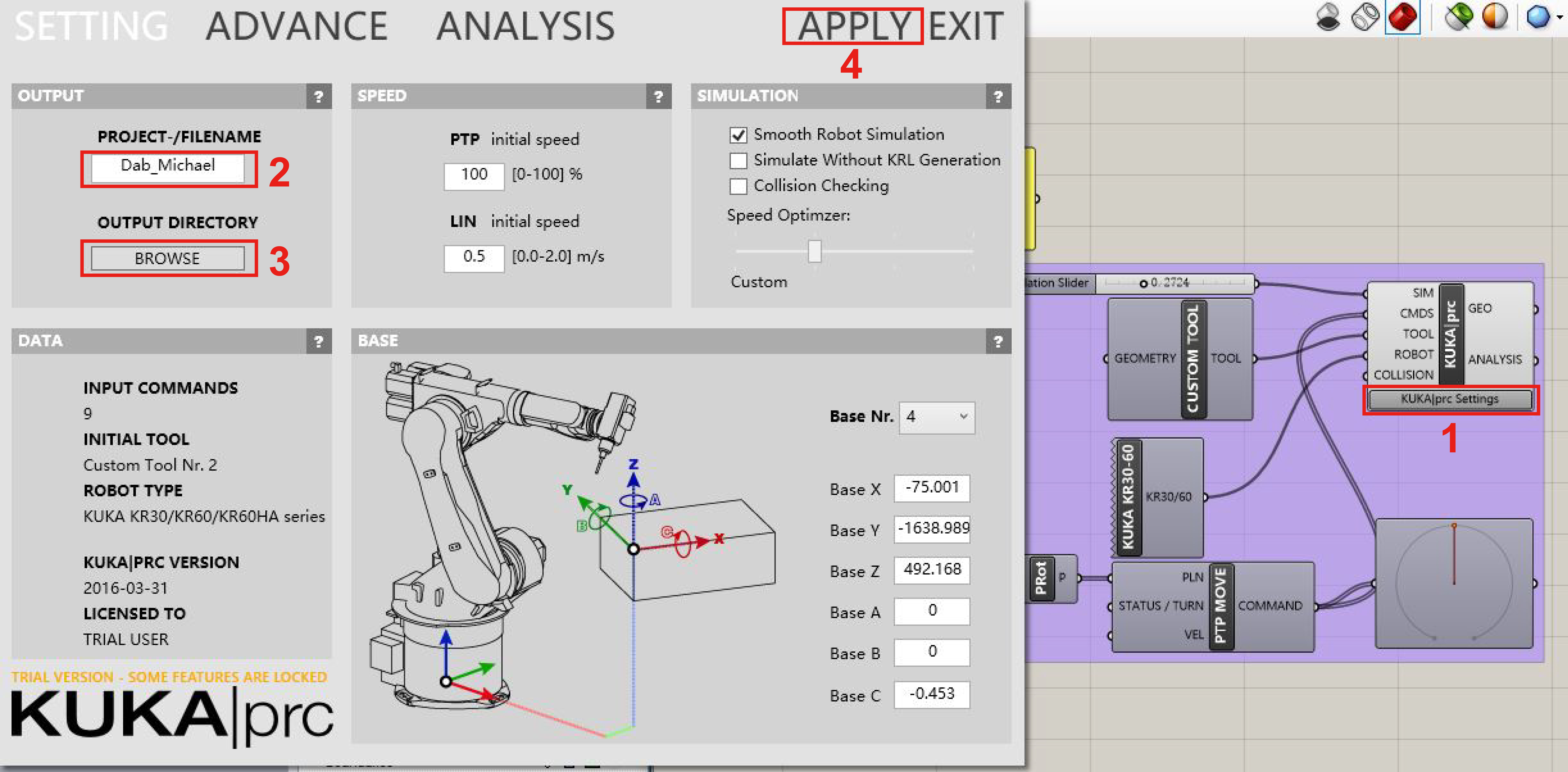
1 - Click the KUKAprc Setup button
2 - Name your output file
3 - Select your output file location
4 - Click Apply