| Div | ||
|---|---|---|
| ||
Contents |
| Page properties | ||
|---|---|---|
| ||
| Excerpt |
|---|
AboutThe School of Architecture Robotics Lab |
Welcome to the official UT Robotics Lab Wiki!
What is the UT Robotics Lab:
...
is a place for creative |
...
exploration and practical realization of |
...
advanced digital fabrication methods. We work to foster an environment of curious exploration and offer a wide array of tools and support for |
...
School of Architecture students, faculty, and staff to realize their creative interests. Using Kuka Kr60 industrial robot arms and a DKP400 two-axis positioner, the robotics lab is equipped to |
...
allow engaged participants to prototype tools and undertake a variety of tasks |
...
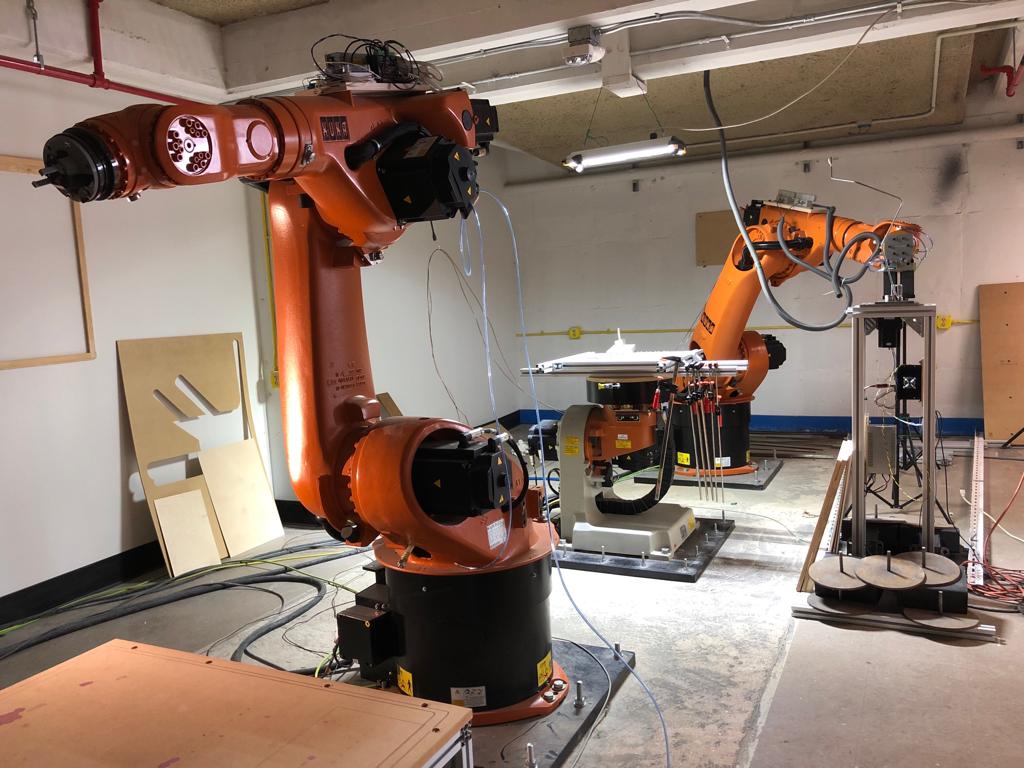

...
using 7 axes.
What We DoAt the UT Robotics Lab, through our continuous research into robotics and design, we have developed various custom tools and |

...
work-flows using a variety of scripting languages such as Grasshopper, Python, VBA, |
...
C# and others. Students and faculty are encouraged to get certified and join us in using the following processes (or developing new ones!):
|
...
Currently, robots are programmed primarily using the KUKA PRC plugin for grasshopper to |
...
produce a set of toolpaths to follow. Each |
...
of the pre-defined tasks above has its own |
...
dedicated workspace which allows the KUKA PRC to translate virtual space in Rhino 3D to the real world setup. Instead of writing code, simple function-blocks are connected with each other and the results immediately visualized. This instantaneous feedback allows the |
...
acceleration of the process from the programming environment to the robot, or from design to fabrication. Our |
...
current KUKA PRC |
...
scripts accept MESHES and LINES and can be used with some of the |
...
end-of-arm tools we have developed in-house. Some additional tools are available to all faculty and students with a minor lead time for tool changing and preparation:
|
...
The |
...



...
robotic arm's versatility allows it to become a completely different tool using a simple change in the end-effector. Whether a tool is custom-designed or off-the-shelf, we have the capacity to do almost anything robots are capable of. Our research is aimed at blurring the line between robots and design, and the lab is at your disposal for your own projects toward those ends.
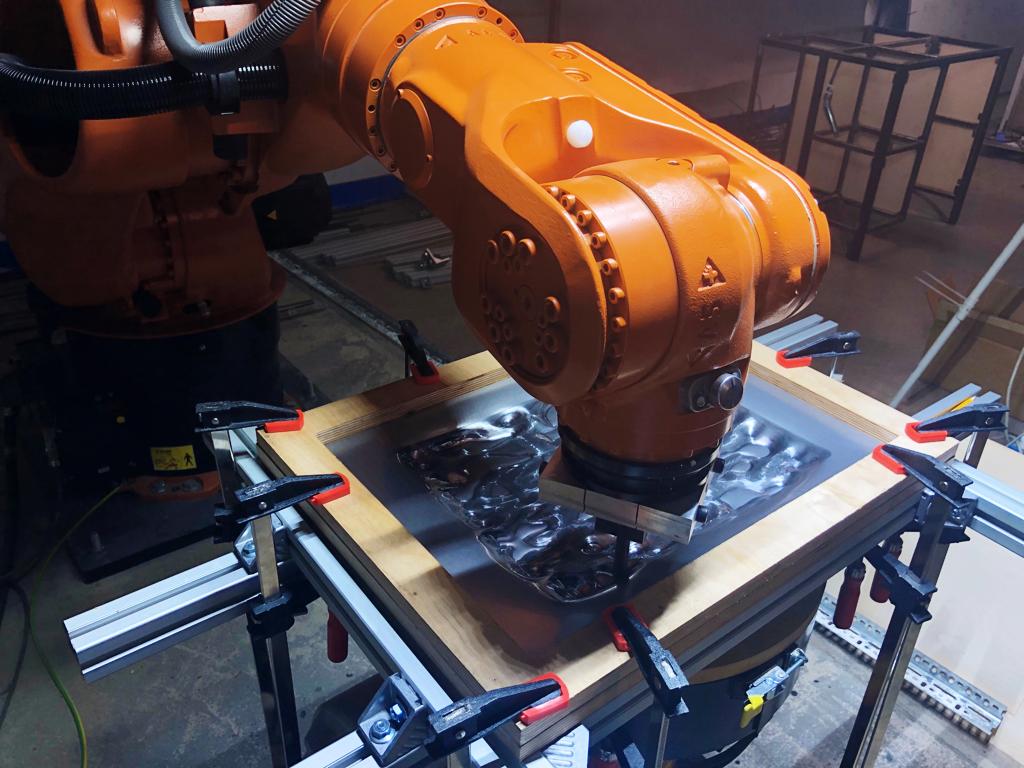
Incremental Metal Forming Heat Gun Forming |



...
Rod Bending |
...
Wood Milling
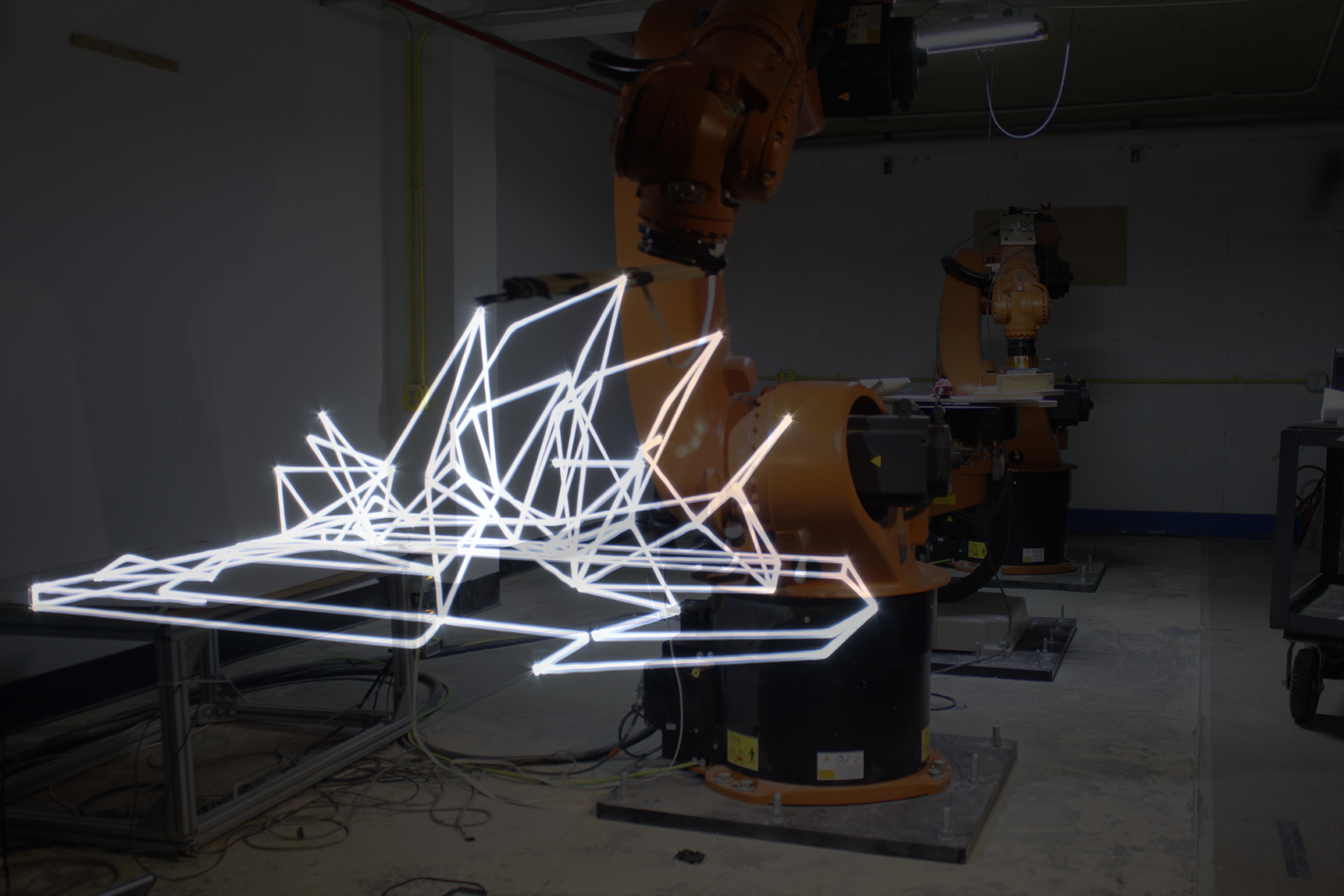
Exhibition (1) Exhibition (2) Multilayered Pen Drawing |


How To Reach Us
...
How-to Articles
| Page properties report | ||||||
|---|---|---|---|---|---|---|
|
Processes
| Page properties report | ||||||
|---|---|---|---|---|---|---|
|
Troubleshooting
| Page properties report | ||||||
|---|---|---|---|---|---|---|
|
Policies
| Page properties report | ||||||
|---|---|---|---|---|---|---|
|
Examples
| Page properties report | ||||||
|---|---|---|---|---|---|---|
|